SECTION FOUR - COMPONENT DESCRIPTION AND SPECIFICATION 4.7
4.2.1. Diagnostic LED's
The status of the Controller may be monitored using the diagnostic LED indicators on the
front panel as listed in Table 4-2.
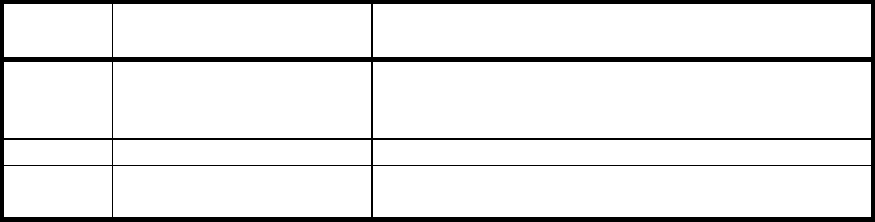
LED
Color
Label Condition Indicated
Red SYSTEM FAULT A software or hardware fault has occurred. The
specific fault can be determined by querying the
controller via the communications interface.
Yellow FOLD BACK ACTIVE The continuous torque limit has been exceeded.
Green ENABLE Controller is enabled and ready to accept motion
command.
TABLE 4-3. T161 SERIES CONTROLLER STATUS INDICATORS
4.2.2. Circuit Description
This description of the T161 series controller refers to Figure 4-5, the controller block
diagram.
4.2.2.1. Logic Power Supply
Logic power for the control is generated in the model 160 power supply. This is delivered
by way of the back plane to all RMC axes installed.
4.2.2.2. CPU Section
The microprocessor (CPU) used in the control is an 80C186. It interfaces to 16K of RAM,
128K of EPROM, EEPROM, A/D converter, D/A converter, watchdog timer, fault detection
and display circuitry, and UART serial communication device. The CPU stores setup
parameters in EEPROM so that they are available after power is removed and reapplied. It
takes in the discrete enable input and the analog command input from the customer
interface. Under the conditions of proper setup, no control faults, and valid enable, the
CPU enables the output stage and provides the commutated phase current commands to
drive the motor in either the torque controlled mode or the velocity controlled mode. One of
these modes is selected by the user. The CPU accepts user setup information and
provides status information via the UART serial interface. Faults are detected and
processed by the CPU. A watchdog timer which has a time-out time of 2.5 milliseconds will
disable the controller were the CPU to fail.




















