



















64 Fieldbus interface
6 Operation IL•1F CANopen DS301
0198441113586, V2.01, 11.2008
6.3.1 Switching the power stage on and off
The power stage is enabled by the transition from operating state 4 to 6
. For this purpose, the two bits Enable and Disable are available in the
R_PDO4. One of them must be "1", the other "0".
Enabling the power stage Prerequisite: the product in in operating state 4.
To enable the power stage, a "0 -> 1" edge must be generated in
drivectrl, bit 1 (Enable). This can be done by deleting bit 0 (Disable)
and setting bit 1 . The master then waits until the product signals oper-
ating state 6 . This may take a while (approx. 1 second) since various
tests are run when the power stage is enabled.
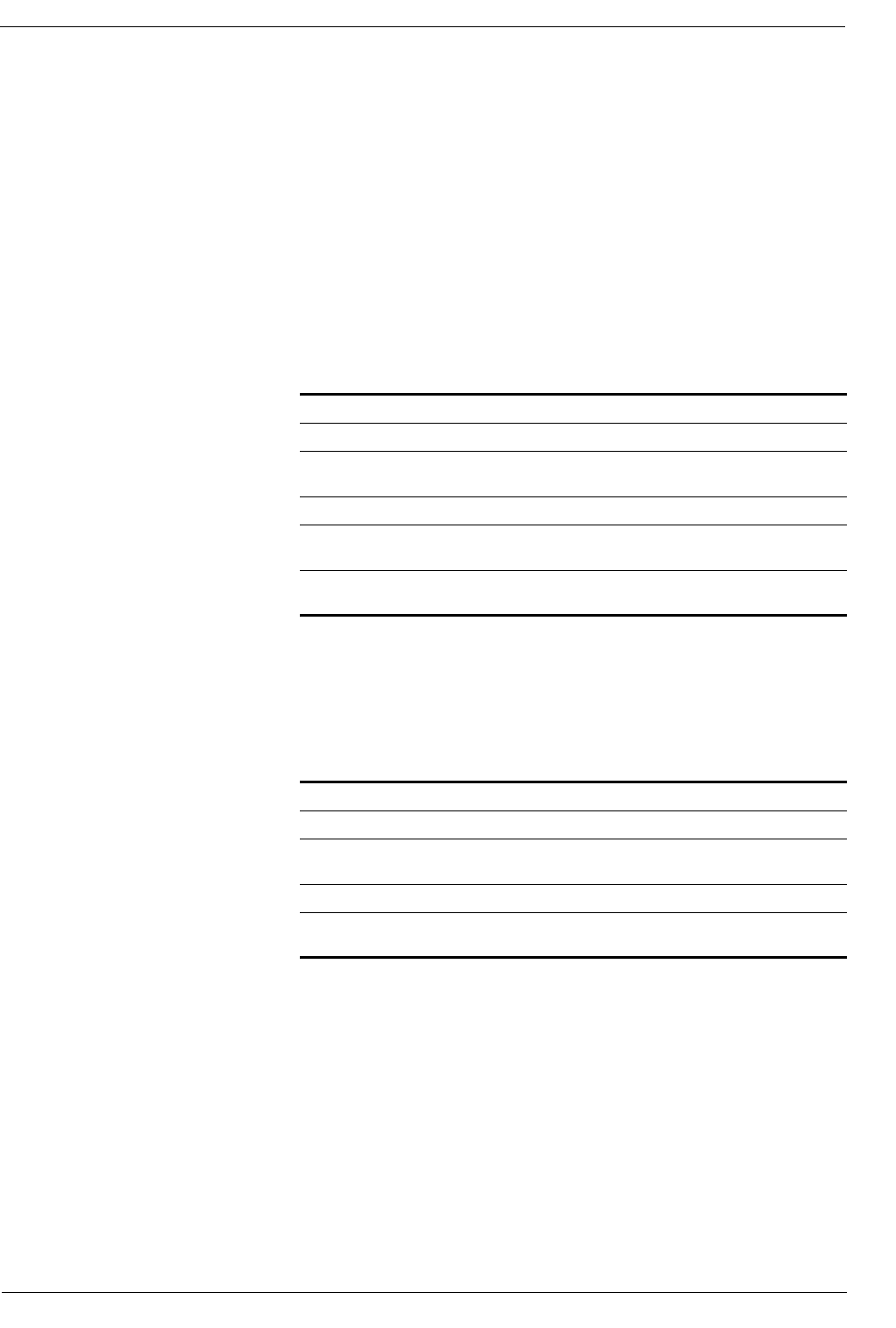
Example
Disabling the power stage Prerequisite: Product is in operating state 6 or 7.
To disable the power stage, a "0 -> 1" edge must be generated in drivec-
trl, bit 0 (Disable). This can be done by setting Bit 0 (Disable) and de-
leting bit 1 (Enable). The product switches to operating state 4.
Example
6.3.2 Triggering a "Quick Stop"
A running motion command can be interrupted via the fieldbus at any
time with the Quick Stop command. The stop is triggered by a "0 -> 1"
edge in drivectrl, bit 2. After the state transition to operating state 7
(Quick Stop), the product decelerates with the set EMERGENCY STOP
ramp and comes to a standstill.
In order to start a new motion command, you must first set the product
to operating state 6 . To achieve this, do one of the following:
• Fault Reset"0 -> 1" edge in drivectrl, bit 3
• Quick Stop release"0 -> 1" edge in drivectrl, bit 4
Master <---> Slave
Disable is requested ---> drivectrl01
h
Slave signals operating
state 4
<--- driveStat XXX4
h
Request Enable ---> drivectrl02
h
Slave signals operating
state 5
<--- driveStat XXX5
h
Slave signals operating
state 6
<--- driveStat XXX6
h
Master <---> Slave
Enable is requested ---> drivectrl 02
h
Slave signals operating
state 6
<--- driveStat XXX6
h
Request disable ---> drivectrl 01
h
Slave signals operating
state 4
<--- driveStat XXX4
h